Machine Recycling Discussion and Moderated Newsgroup > Full Machines
> Complete Machines
> Welders
> BS2 breadboard robot complete kit pic basic stamps
BS2 breadboard robot complete kit pic basic stamps
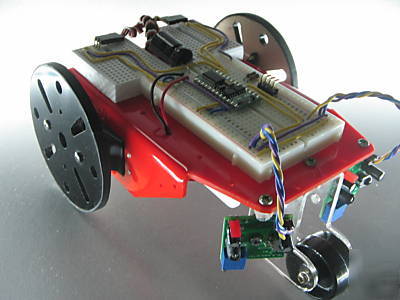
You are viewing a new customised BS2 Breadboard Robot Complete Starter Kit
Package Include : (1X)3.75" X 4.5" Body, (2 X) 3" Wheels, (1X) Front Wheel, (3X) Pre-installed Breadboards, srews and pin. (2X) IR Sensors, (1X) Basic Stamp2-IC, (2x) Servo Motors, Schematic Block Diagram, Sample Code in PBASIC
For sample video, please check out below:
* 1X small front wheel and holder bracket
This is the complete deal. All you need is some wires (single core AWG28) and you are ready to assemble.
This product is meant to help students making a desktop mobile robot. It is built rugged and versitile. Ideal for young students of science and electronics.
'***********************************************************************
' It can be modified easily to make a line tracer, object follower
j VAR Word ' Declare variable J for making a do loop
'************************************************************************
'PULSOUT 6, PULSOUT 7 - To control servo motors left and right
'IN0 and IN1 - For sensing left and right sensors
'****************** MAIN Program*********************************
PULSOUT 6, 700 ' right wheel moves forward 700
PAUSE 20 ' pause to slow down and save battery
PULSOUT 7, 830 'left wheel moves forward 830
'************'Now check for obstacles and make a turn if needed*********
IF IN1 = 1 AND IN0=1 THEN backup ' If both sensors detected, back up
IF IN0 = 1 THEN right_turn ' If Left sensor is high then go right
IF IN1 = 1 THEN left_turn ' If Right sensor detected, go left
GOTO start ' Continue forward is nothing is detected
'*******************End of Main Program **************************
'**************************************************************************
'Subroutines for backup, turn left, turn right below.
backup: ' Reverse and turn away
FOR j = 1 TO 200 STEP 10 ' Turn away after backing up a bit
'****************************************************************
right_turn: ' Subroutine for turing right
PAUSE 100 ' Pay attention to motion on motors, the motors
FOR J= 1 TO 200 STEP 10 ' use diffrential mode to navigate left and right
'***************************************************************
left_turn: ' Subroutine for turning left
'**************************END *********************** *********